果然,只有做大project的时候才可以坚毅和努力求学地学会难难的东西..
https://github.com/zenkernelsam/PolyU_EEE_AUV2024_FYP
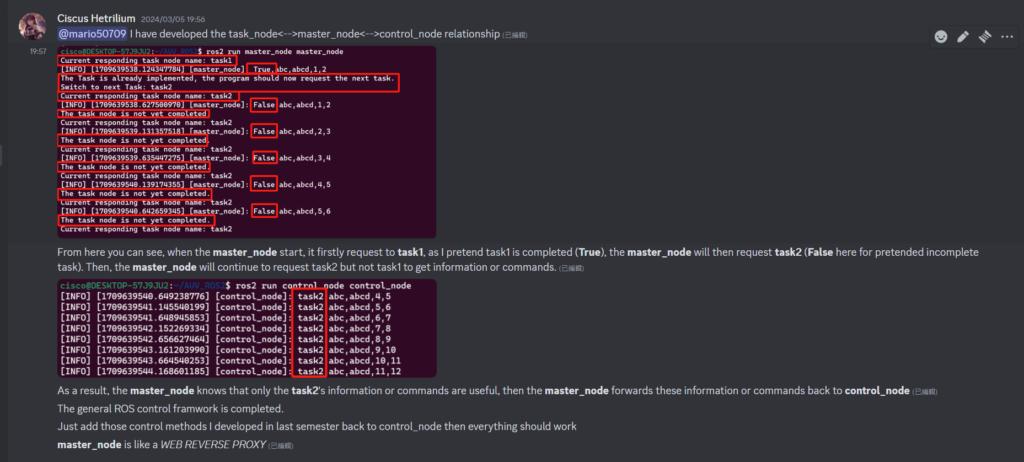
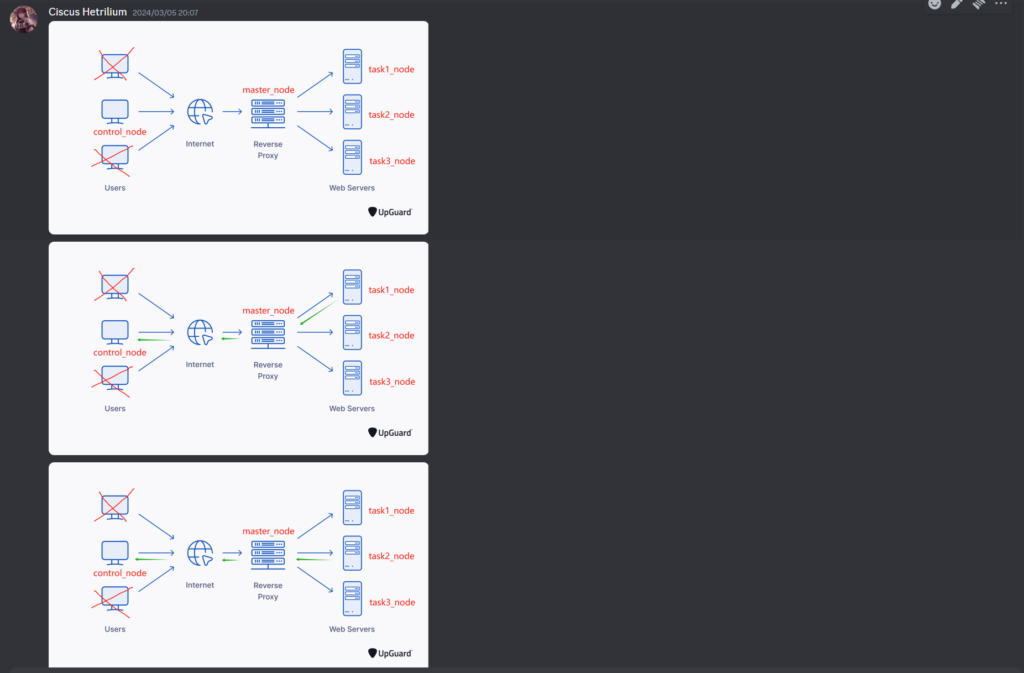
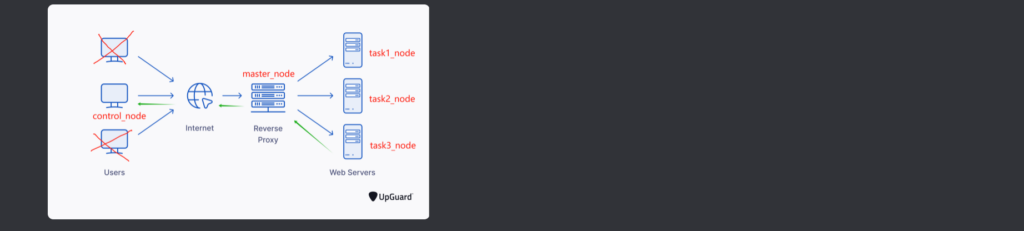
这是我写的基于ROS2的communication protocol (topic, service, callbacks, self-defined interfaces, request, respond,….学得的乱七八糟)加上Revserse Proxy概念设计的水下自动化机器人的ROS2 control framework (当然自动化不是我负责的,是处理OpenCV的同学朋友弄的,我只是负责数据处理和硬件控制)。
然后因为总是手动复制粘贴备份源码实在太累了,所以学会了git push源码到GitHub这样看commit方便也省心。
至于这个Framework到底是什么东西啊… 等我毕业了就把这个毕业专设的PDF上到这给大家研究下吧。 我也忘了快(?)
如果你觉得我毕业了我就毕业了,如果你觉得我没有毕业就还没有毕业。
毕业论文:
鄙人不才,也不是专业computer science学生,就是个打杂的,和会点点Linux和Python和计算机原理和网络前端后端开发而做出来的“没用的东西”。希望这玩意在4月新加坡比赛(SAUVC)不会掉链子(干写Python可以写到memory leakage和stack overflow…) 黑历史难回望,意满灰,啧。